 Hydraulics and Environment Department
Hydraulics and Environment Department
The R&D Project aims to development an autonomous catamaran vessel for surface water monitoring, configurable enough to deal specifically with the Water Framework Directive (WFD) monitoring requirements (European Commission, 2003) established in the European River Basin Management Plans (RBMP).
Since the fixed monitoring sites can only offer a restricted sampling of the water body conditions, we have developed an innovative autonomous robotic vessel capable to observe and measure water quality and hydromorphological elements on rivers, estuaries and reservoirs. This platform was conceived to be used in narrow (a few meters) to large systems and in a variety of depths, having the ability to monitor obstacles and handles sharp bathymetric, geometric and hydrodynamic variations.

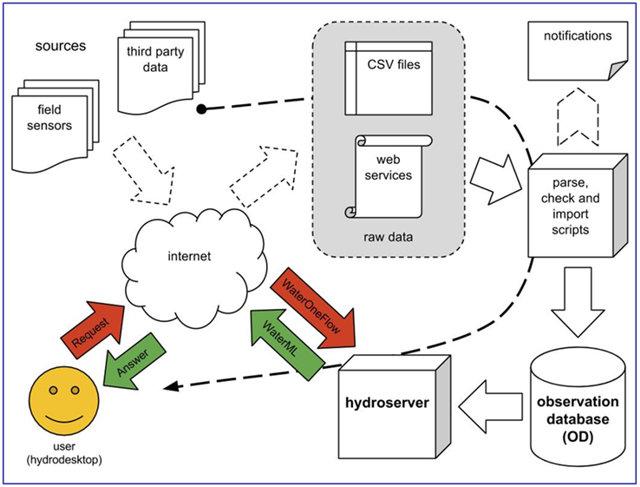
An information system platform was developed to support the collection, organisation, storage, analysis and publication of continuously hydrologic observations based on a SOAP and REST web-services architecture. These data services (based on WaterML - Water Markup Language), and the corresponding metadata information published in the Internet, allow users to discover and consume water observations and measurements into the most popular analysis platforms, like MS Excel®, R, Matlab® or ArcGIS®. This methodology reduces considerable the use of valuable personal time and resources to discover and access hydrologic data for research and water management.
To discover and access hydrologic and weather data to be used in research and water resources management actions can be a complex and timely task. This task usually requires the identification and inquiry of several data repositories, each one implementing different methods to explore and access the data.
New advances in cyber-infrastructures and semantic mediation technologies offer the means to create better tools that support the discovery and access to hydrologic data. With this information infrastructure to control, register and publish data we pretend to offer an efficient way to discover, download, manage, visualize and analyze the hydrologic data acquired by the catamaran.
The information system that supports the catamaran allows the programming and monitoring mission control, the registration of data and the publication of data time series online, based on data standards such as WaterML.
Onboard control infrastructure
The central system to control the vessel chosen was the MOOS (Mission Orientated Operating Suite). The MOOS was chosen by the fact that is the one of the most used platforms for oceanographic autonomous applications (UMV e UUV). This platform complies with all the requirements for the AquaGIS-Mon platform in terms of control, autonomous navigation and mission planning and execution.
Navigation Sensors
For navigation control purposes there are sensors (under and above the waterline) providing information to the onboard navigation system. This system makes decisions about navigation routes and water sensors readings based on the navigation sensors.
The security requirements are:
- Geographic area limits for the monitoring mission. If during mission the vessel postpones these limits, the navigation system sets a security mode (turns off motors and send a localization beacon);
- Implement a life signal emission (5 seconds of frequency) to the operations centre using a communication channel. If the signal isn’t sent the vessel enters in security mode. The vessel implements an AIS location beacon.
- The vessel must have a collision avoidance route calculator (COLREG rules) ;
- The vessel should navigate through geographic coordinates and always know its position.
The propulsion system is responsible for thrust and position maintenance, even under the influence of currents and winds. The calculations were based on a 3 Knots (~5.6 Km/h) of current against vessel navigation bearing; the vessel should be capable of maintain a 3knots real velocity.
In absolute terms the vessel should be capable to reach a velocity of 6 knots (~11.1 Km/h), without the influence of winds and current.
Communication System
The main communication channel has enough bandwidth to support the following communication channels:
- Realtime communications of imagens from the sensoring optic unit (3 stream 640x490 compression H.264 at 5 fps ~3x240 kbps= 720kbps);
- Radar image (2 fps equivalent: ~96 kbps);
- Navigation sensors and status of the water sensors (5 data packages of 2kb: ~80 kbps);
The vessel implements a redundant communication system that allows a permanent remote command and monitoring in a failure scenario of the main communication system.
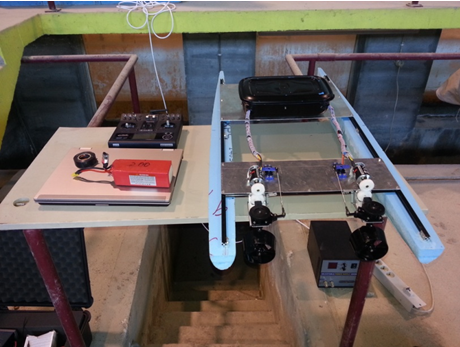
The first navigation tests have used a scale physical model (1/5) and were tested at LNEC facilities (fig. 1 and 2).

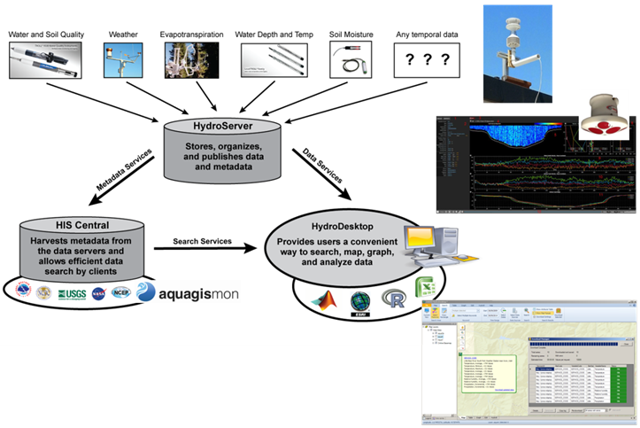
For the hydrologic data management (acquisition, communication and online publication) a information system infrastructure was implemented. This infrastrure is based on 3 main components:
- HydroServer, to store, organize and publish data and metadata;
- HISCentral, to harvest metadata from hydroservers and enable efficient data search by client applications;
- HydroDesktop, provides users a convenient way to search, map, graph and analise data.
The web services registry on HISCentral is available at:
The AquaGIS web service registry is illustrated in Figure 7 .
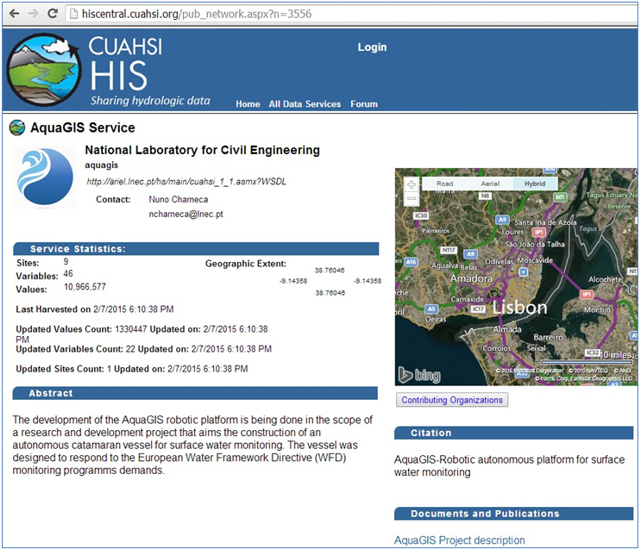
Figure 7 . AquaGIS-Mon web service registry in HISCentral
The web service is explorable using the HydroDesktop client (Download HydroDesktop) as showed in Figure 8 .
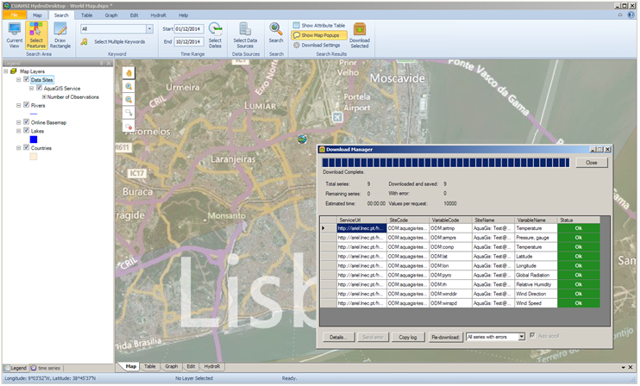
Figure 8 . Access to weather data through project web services using CUAHSI – HydroDesktop application


« return
{kind=link}