 Departamento de Hidráulica e Ambiente
Departamento de Hidráulica e Ambiente
Projetos - AQUAGIS-Mon - Plataforma móvel autónoma de monitorização de águas superficiais interiores e de transição
O projeto de I&D 'AquaGIS-Mon' tem como objetivo o desenvolvimento de um sistema inteligente de monitorização de recursos hídricos superficiais interiores e de transição (estuários) e da infraestrutura informática de controlo da embarcação e de gestão dos dados relativos a parâmetros hidrológicos e meteorológicos.

Resumo
O projeto de I&D 'AquaGIS-Mon' tem como objetivo o desenvolvimento de um sistema inteligente de monitorização de recursos hídricos superficiais interiores e de transição (estuários) e da infraestrutura informática de controlo da embarcação e de gestão dos dados relativos a parâmetros hidrológicos e meteorológicos.
Este sistema inclui uma plataforma móvel autónoma e robotizada para aquisição de dados sobre a qualidade e quantidade da água em rios, albufeiras e estuários. Além desta plataforma inclui uma rede de telecomunicações e uma infraestrutura informática para registo, análise e partilha de dados online com base em padrões de dados, nomeadamente WaterML.
Descobrir e aceder a dados hidrológicos e climatológicos para utilizar em investigação e ações de gestão de recursos hídricos pode ser uma tarefa complexa e demorada. Esta tarefa requer normalmente a identificação e inquirição de diversos repositórios de dados, cada um deles no seu sítio web e com a sua interface própria de exploração, formato de dados e semântica. Novos avanços em ciber-infraestruturas e tecnologias de mediação semântica oferecem atualmente os meios para criar melhores ferramentas que suportem a descoberta e o acesso aos dados hidrológicos. Com a infraestrutura de controlo, registo e publicação de dados pretende-se dispor de um meio eficiente para descobrir, descarregar, gerir, visualizar e analisar os dados hidrológicos adquiridos pela plataforma.
Entende-se por infraestrutura de controlo, registo e publicação de dados as componentes do sistema externas à plataforma de monitorização. Estas componentes compreendem sobretudo o sistema de informação de suporte à operação da plataforma de monitorização mas excluem os equipamentos a bordo da plataforma. O sistema de informação de suporte à plataforma deverá permitir a programação (configuração) e controlo de missões de monitorização, o registo dos dados adquiridos e a publicação desses dados online por via de formatos específicos (p.e. WaterML).

Infraestrutura de controlo embarcada
Como sistema central da plataforma AquaGis-Mon foi escolhido o sistema MOOS (Mission Orientated Operating Suite). Esta escolha foi fundamentada no facto de ser a plataforma mais utilizada por sistemas autónomos marítimos (UMV e UUV). Esta ferramenta satisfaz todos os requisitos elaborados para a plataforma de monitorização do AquaGis-Mon, em termos de controlo, navegação autónoma, e de planeamento e execução de missões.
Sensores de navegação
Para que a embarcação possa navegar de forma autónoma e em segurança existe um conjunto de sensores que fornecem informações ao sistema de navegação para que este possa tomar as decisões e governar a embarcação seguindo os objetivos da missão programada. Neste sentido existem requisitos de segurança que deverão ser cumpridos pela embarcação:
O sistema de propulsão é responsável por impulsionar a embarcação e colocá-la a uma determinada velocidade ou para manter uma posição definida, mesmo que influenciada por ventos ou correntes (até certos limites). O dimensionamento do sistema de propulsão teve em conta as características das massas de água onde a plataforma vai operar e o próprio peso da plataforma. Considerou-se como pior cenário uma corrente de 3 nós (cerca de 5,6 Km/h) e que a embarcação deverá poder atingir uma velocidade máxima 3 nós de velocidade aparente (influenciada negativamente por corrente e ventos). Em termos absolutos o propulsor terá uma potência suficiente para colocar a embarcação a navegar com uma velocidade máxima de 6 nós (cerca de 11,1 Km/h).
Sistema de comunicações
A plataforma possui um sistema de comunicações redundante que permite a monitorização e comando remoto da embarcação em caso de falha no sistema principal de comunicações. O canal principal de comunicações possui largura de banda suficiente para que durante a missão seja possível suportar os seguintes canais de informação:



Equipa
LNEC - Nuno Charneca, Anabela Oliveira, Luis Mesquita David, Ana Estela, Gonçalo de Jesus, João Rogeiro
AmbiSIG - Sílvia Rodrigues, José Rocha, Ricardo Faria
Universidade de Coimbra - Rita Fernandes de Carvalho, Lino Marques
Entidades Financiadoras:


O projeto de I&D 'AquaGIS-Mon' tem como objetivo o desenvolvimento de um sistema inteligente de monitorização de recursos hídricos superficiais interiores e de transição (estuários) e da infraestrutura informática de controlo da embarcação e de gestão dos dados relativos a parâmetros hidrológicos e meteorológicos.
Este sistema inclui uma plataforma móvel autónoma e robotizada para aquisição de dados sobre a qualidade e quantidade da água em rios, albufeiras e estuários. Além desta plataforma inclui uma rede de telecomunicações e uma infraestrutura informática para registo, análise e partilha de dados online com base em padrões de dados, nomeadamente WaterML.
Descobrir e aceder a dados hidrológicos e climatológicos para utilizar em investigação e ações de gestão de recursos hídricos pode ser uma tarefa complexa e demorada. Esta tarefa requer normalmente a identificação e inquirição de diversos repositórios de dados, cada um deles no seu sítio web e com a sua interface própria de exploração, formato de dados e semântica. Novos avanços em ciber-infraestruturas e tecnologias de mediação semântica oferecem atualmente os meios para criar melhores ferramentas que suportem a descoberta e o acesso aos dados hidrológicos. Com a infraestrutura de controlo, registo e publicação de dados pretende-se dispor de um meio eficiente para descobrir, descarregar, gerir, visualizar e analisar os dados hidrológicos adquiridos pela plataforma.
Entende-se por infraestrutura de controlo, registo e publicação de dados as componentes do sistema externas à plataforma de monitorização. Estas componentes compreendem sobretudo o sistema de informação de suporte à operação da plataforma de monitorização mas excluem os equipamentos a bordo da plataforma. O sistema de informação de suporte à plataforma deverá permitir a programação (configuração) e controlo de missões de monitorização, o registo dos dados adquiridos e a publicação desses dados online por via de formatos específicos (p.e. WaterML).
Como sistema central da plataforma AquaGis-Mon foi escolhido o sistema MOOS (Mission Orientated Operating Suite). Esta escolha foi fundamentada no facto de ser a plataforma mais utilizada por sistemas autónomos marítimos (UMV e UUV). Esta ferramenta satisfaz todos os requisitos elaborados para a plataforma de monitorização do AquaGis-Mon, em termos de controlo, navegação autónoma, e de planeamento e execução de missões.
Sensores de navegação
Para que a embarcação possa navegar de forma autónoma e em segurança existe um conjunto de sensores que fornecem informações ao sistema de navegação para que este possa tomar as decisões e governar a embarcação seguindo os objetivos da missão programada. Neste sentido existem requisitos de segurança que deverão ser cumpridos pela embarcação:
- Definição de limites geográficos de operação na missão, se durante a missão a embarcação ultrapassar os limites a embarcação entra modo de segurança (desliga propulsores e emite sinal de localização);
- Deverá ser gerado um sinal de vida e enviado periodicamente (exemplo intervalos de 5 segundos) pelo centro de operações via canal de comunicações para a embarcação, e em caso de perda do sinal de vida a embarcação entra em modo de segurança;
- Deverá existir a bordo da embarcação um emissor de sinal de localização de emergências tipo AIS;
- A embarcação deverá evitar rotas de colisão com outras embarcações (cumprimentos do COLREG);
- A embarcação deverá navegar por coordenadas geográficas e deverá saber sempre a sua localização.
O sistema de propulsão é responsável por impulsionar a embarcação e colocá-la a uma determinada velocidade ou para manter uma posição definida, mesmo que influenciada por ventos ou correntes (até certos limites). O dimensionamento do sistema de propulsão teve em conta as características das massas de água onde a plataforma vai operar e o próprio peso da plataforma. Considerou-se como pior cenário uma corrente de 3 nós (cerca de 5,6 Km/h) e que a embarcação deverá poder atingir uma velocidade máxima 3 nós de velocidade aparente (influenciada negativamente por corrente e ventos). Em termos absolutos o propulsor terá uma potência suficiente para colocar a embarcação a navegar com uma velocidade máxima de 6 nós (cerca de 11,1 Km/h).
Sistema de comunicações
A plataforma possui um sistema de comunicações redundante que permite a monitorização e comando remoto da embarcação em caso de falha no sistema principal de comunicações. O canal principal de comunicações possui largura de banda suficiente para que durante a missão seja possível suportar os seguintes canais de informação:
- Comunicações em tempo real de imagens da unidade ótica de sensorização, 3 stream 640x490 compressão H.264 a 5 FPS ~3x240 kbps= 720kbps;
- Comunicação da imagem radar, pode considerar-se equivalente a uma camara com 2 FPS, (~96 kbps);
- Informação instrumentação de navegação e estados do sistema de analise e recolha de dados, 5 pacotes por segundo de 2kB (~80kbps);
- Envio de mensagens de comando e sinal de vida para a embarcação (~ 10kbps).
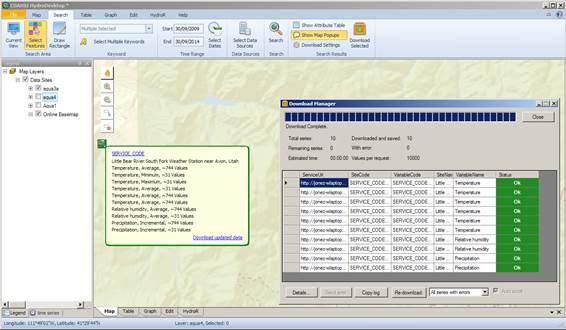
Os testes de aquisição e gestão de dados meteorológicos permitem já publicar os valores adquiridos pela estação meteorológica online de acordo com o padrão WaterML.
Figura 1 – Acesso aos dados meteorológicos do projeto através da aplicação CUAHSI – HydroDesktop.
Equipa
LNEC - Nuno Charneca, Anabela Oliveira, Luis Mesquita David, Ana Estela, Gonçalo de Jesus, João Rogeiro
AmbiSIG - Sílvia Rodrigues, José Rocha, Ricardo Faria
Universidade de Coimbra - Rita Fernandes de Carvalho, Lino Marques
Entidades Financiadoras:
Ano: 2013
Coordenador(es):
AMBISIG
Entidade(s) Financiadora(s):
European Regional Development Fund, Compete, QREN
« voltar